MELSERVO-J4シリーズ サーボアンプ 形名構成

1軸サーボアンプ (注14)
GF GF-RJ B B-RJ A A-RJ
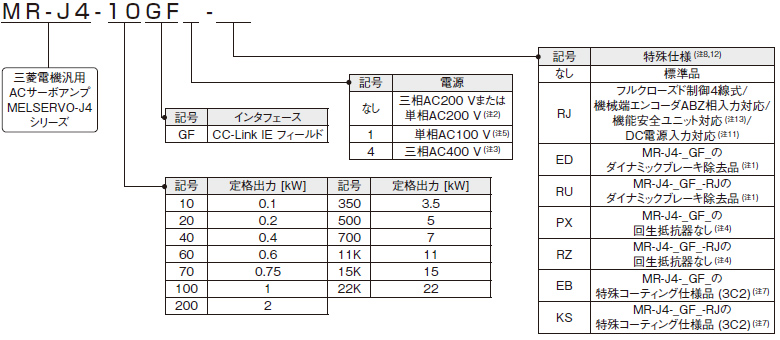
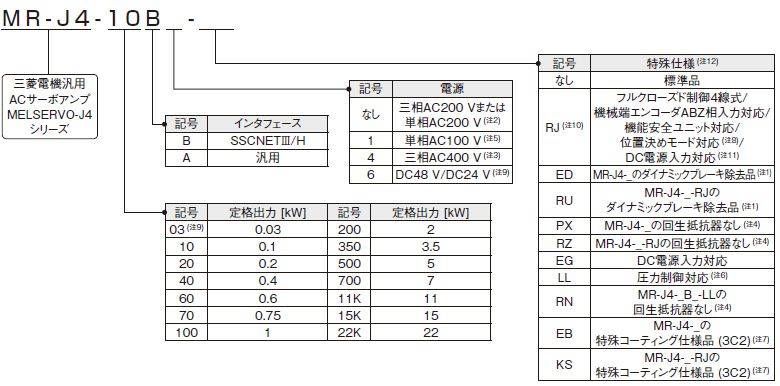
- 注1. 7 kW以下のサーボアンプに内蔵されているダイナミックブレーキが除去されたタイプです。ダイナミックブレーキ除去品使用時は、アラーム発生時や電源遮断時などにサーボモータがフリーラン停止となるため、急停止しません。装置全体で安全を確保してください。また、特定のサーボモータ使用時にアラームが発生した場合、電子式ダイナミックブレーキが作動することがあります。電子式ダイナミックブレーキは、サーボパラメータを設定することで解除可能です。 詳細については、各サーボアンプ技術資料集を参照してください。
- 2. 単相AC200 Vは0.1 kW~2 kWのサーボアンプのみです。
- 3. 0.6 kWおよび1 kW以上のサーボアンプのみです。
- 4. 11 kW~22 kWのサーボアンプで標準付属品である回生抵抗器が付属しないタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
- 5. 0.1 kW~0.4 kWのサーボアンプのみです。
- 6. MR-J4-_B_-LLのみです。圧力制御対応サーボアンプについては、『MR-J4-_B_-LL MR-J4-DU_B_LL サーボアンプ技術資料集』を参照してください。
- 7. サーボアンプの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2)を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
- 8. 位置決めモードは、MR-J4-GF(-RJ)/MR-J4-A-RJサーボアンプで対応しています。
- 9. MR-J4-03A6(-RJ)サーボアンプのみです。
- 10. MR-J4-03A6-RJは位置決めモードのみ対応しています。フルクローズド制御、機械端エンコーダABZ相入力、および機能安全ユニットには対応していません。
- 11. 200 Vのみです。
- 12. 各機能が対応しているサーボアンプのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
- 13. CC-Link IEフィールドネットワーク Basicで使用する場合、MR-D30機能安全ユニットは対応していません。
- 14. ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
多軸一体サーボアンプ (注8)
WB
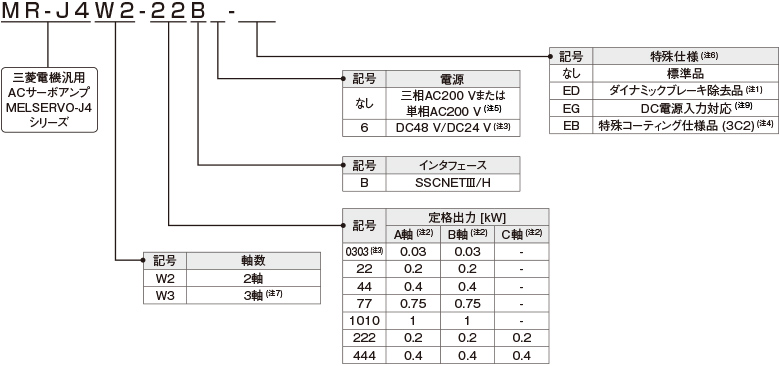
- 注1. サーボアンプに内蔵されているダイナミックブレーキが除去されたタイプです。ダイナミックブレーキ除去品使用時は、アラーム発生時や電源遮断時などにサーボモータがフリーラン停止となるため、急停止しません。装置全体で安全を確保してください。また、特定のサーボモータ使用時にアラームが発生した場合、電子式ダイナミックブレーキが作動することがあります。電子式ダイナミックブレーキは、サーボパラメータを設定することで解除可能です。詳細については、各サーボアンプ技術資料集を参照してください。
- 2. A軸、B軸、C軸は多軸一体サーボアンプの軸名称を表します。C軸は3軸一体サーボアンプの場合です。
- 3. MR-J4W2-0303B6サーボアンプのみです。
- 4. サーボアンプの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
- 5. 単相AC200 Vは0.2 kW~0.75 kWのサーボアンプのみです。
- 6. 各機能が対応しているサーボアンプのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
- 7. 0.2 kWおよび0.4 kWのみです。
- 8. ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
- 9. 詳細については、営業窓口にお問合せください。
ドライブユニット
B B-RJ B-RJ100 A A-RJ
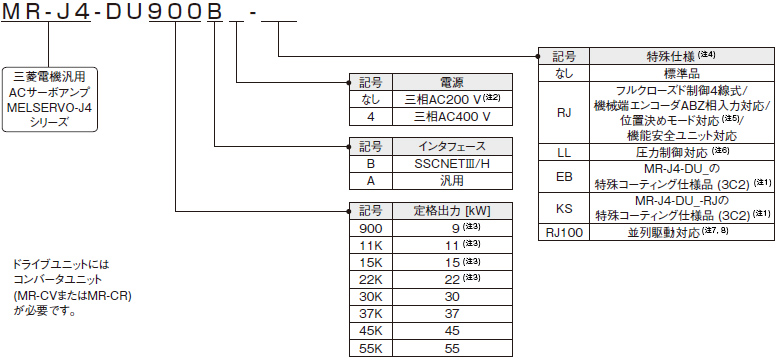
- 注1. 30 kW以上のドライブユニットの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
- 2. 三相AC200 Vは37 kW以下のドライブユニットのみです。
- 3. MR-J4-DU_B_(-RJ) のみです。
- 4. 各機能が対応しているドライブユニットのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
- 5. 位置決めモードは、MR-J4-DU_A_-RJドライブユニットで対応しています。
- 6. 30 kW以上のMR-J4-DU_B_-LLのみです。圧力制御対応ドライブユニットについては、『MR-J4-_B_-LL MR-J4-DU_B_LL サーボアンプ技術資料集』を参照してください。
- 7. 三相AC400 V、45 kW以上のドライブユニットのみです。
- 8. 対応コントローラについては、「 対応コントローラ 」を参照してください。
電源回生コンバータユニット (注1, 3)
B B-RJ B-RJ100
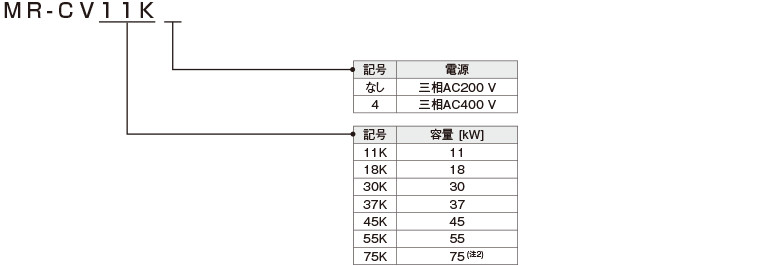
- 注1. 電源回生コンバータユニットと組み合わせられるドライブユニットはMR-J4-DU_B(4)(-RJ) およびMR-J4-DU_B4-RJ100です。
MR-J4-DU_A(4)(-RJ) と組み合わせることはできません。
MR-J4-_B(4)(-RJ)サーボアンプとの組合せについては、『MR-CV_ MR-CR55K_ MR-J4-DU_B_(-RJ) MR-J4-DU_A_(-RJ) 技術資料集』を参照してください。 - 2. 400 Vの電源回生コンバータユニットのみです。
- 3. ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
抵抗回生コンバータユニット (注1, 3)
B B-RJ A A-RJ
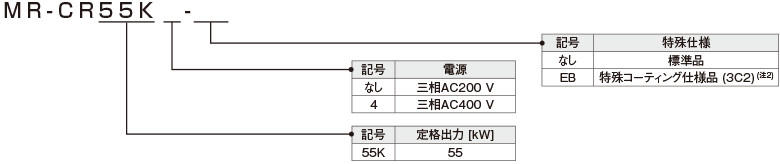
- 注1. ドライブユニット1台につき、1台の抵抗回生コンバータユニットが必要です。
- 2. 抵抗回生コンバータユニットの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。
詳細については、『MR-CV_ MR-CR55K_ MR-J4-DU_B_(-RJ) MR-J4-DU_A_(-RJ) 技術資料集』を参照してください。 - 3. 抵抗回生コンバータユニットと組み合わせられるドライブユニットは、30 KW以上のMR-J4-DU_B(4)(-RJ) および
MR-J4-DU_A(4)(-RJ)です。MR-J4-DU_B4-RJ100および22 kW以下のMR-J4-DU_B(4)(-RJ)と組み合わせることはできません。