MELSEC MXコントローラ MX-Rモデル 製品特長 生産性の向上

- 多軸装置制御を1台のコントローラで実現
- 高速・高精度モーション制御を実現
- シーケンスとモーションの同期制御が簡単実現NEW
- 大規模な装置に必要不可欠なCC-Link IE TSNに対応
- システム全体の制御性能を最適化
- 制御通信とTCP/IP 通信の無線化が可能NEW
- スキャンタイムに依存しない、マークの入力と精密なカットを実現
- 世界のモーションプログラミングをひとつの製品で
- プログラム資産の活用NEW
- 複雑な多軸の調整も、視覚的にわかりやすい
- 視覚的に分かりやすい位置決め設定NEW
- コントローラによるさまざまな制御ループを構築可能
- 高速・高応答で、安定した圧力制御を実現
- パートナーメーカーとの連携で、豊富な機器に対応
多軸装置制御を1台のコントローラで実現
シーケンス/モーション/ネットワークの3つの制御を一体化した高性能マルチコアMPUを標準搭載し、最大256軸の多軸制御を実現。演算周期の混在ができ、多軸でも高速演算周期による制御が可能です。各機構の細かな制御から製造ライン全体の制御まで、コントローラ1台で対応できます。

高速・高精度モーション制御を実現
マルチコアMPU 採用
高速マルチコアMPUの採用で、倍精度浮動小数点などの処理性能が大きく向上。MPUコア間の相互通信により、複数のコアが同時に異なるタスクを処理できるため、シーケンス制御/モーション制御/ネットワーク制御の高速並列処理を実現します。各コアの分散制御で、システム全体のタクトタイム短縮にも貢献します。

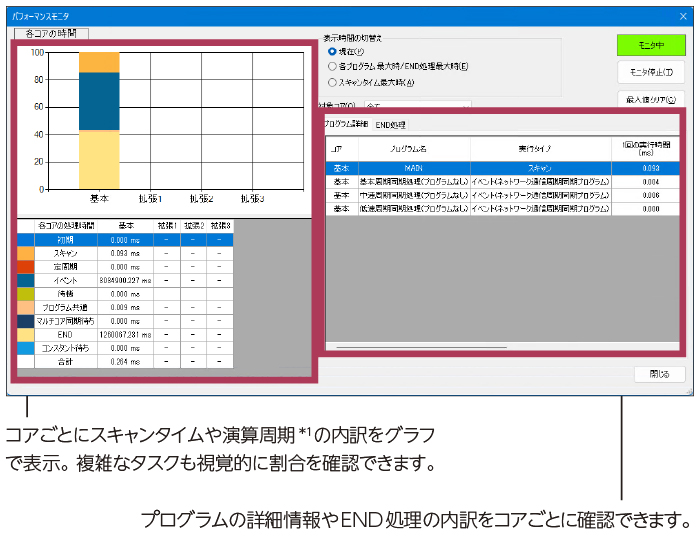
最適な装置制御を実現するため、各コアの負荷状況をモニタし、調整可能
パフォーマンスモニタで、プログラム実行を割り当てたコアごとの演算周期の内訳や負荷状態を見える化できます。
見える化で負荷状態を把握し、演算周期混在機能により負荷を分散することでパフォーマンスを最適化できます。
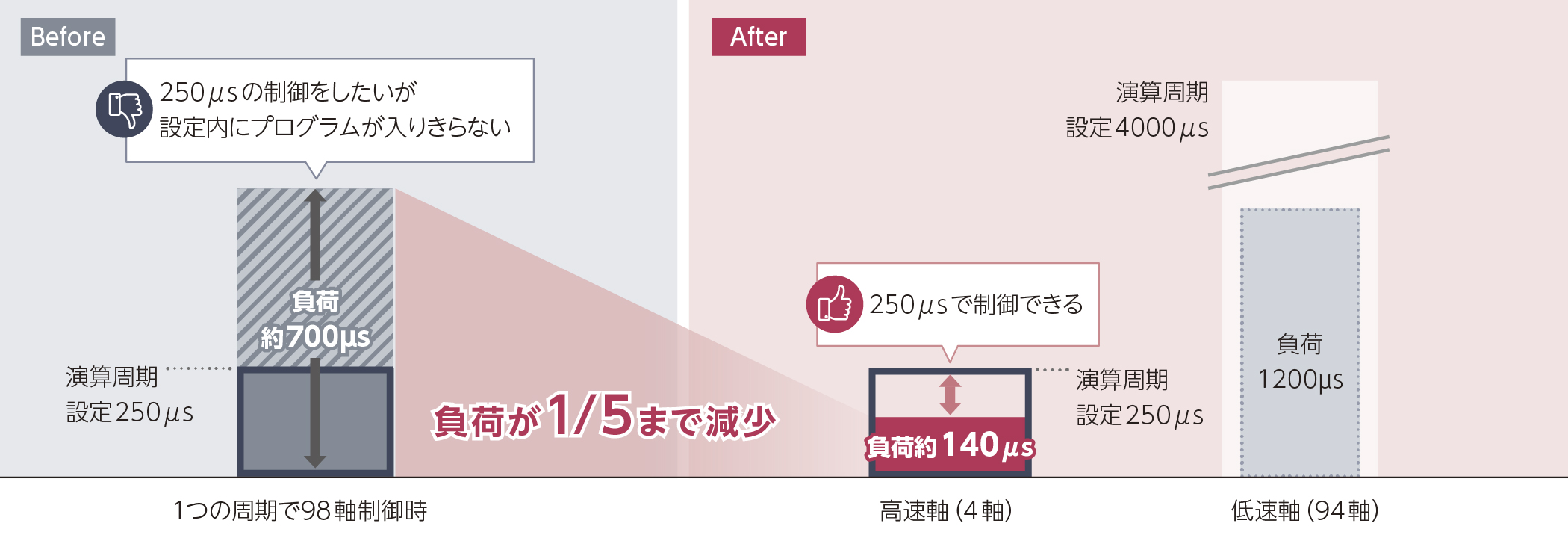
プログラム例
| 項目 | 負荷分散なし | 負荷分散あり |
|---|---|---|
| システム構成 | MXR500-□:1台 + MR-J5:98軸 | |
| 軸数/演算周期の設定 | 98軸 (演算周期250μs設定) |
高速軸:4軸(250μs設定) 低速軸:94軸(4000μs設定) |
*1: 将来対応です。
シーケンスとモーションの同期制御が簡単実現NEW
MPUコア上でシーケンス/モーション/ネットワークの3つの制御を一体化したことで、遅れやばらつきのない制御が可能です。
また、スキャン実行タイププログラムとは独立して、最大3種類(低速、中速、高速)の周期が異なるモーション演算(最短125μs)を構築できます。
モーション制御⇔シーケンス制御間で軸の位置などの内部データが同期されているため、超多軸装置など大量のデータ授受が必要な装置でもモーション制御⇔シーケンス制御間のリフレッシュ設定や割込み命令は不要です。

大規模な装置に必要不可欠なCC-Link IE TSNに対応
あらゆる機器と高速・高精度な連携が可能
CC-Link IE TSNは、制御通信と情報通信の混在を実現可能とするTSN*1技術を採用しています。そのため、MELSEC MXコントローラ1台で、生産現場(FA機器)のリアルタイム制御通信と、ITシステムの情報通信を連携させたシステムを構築できます。
TSNとは?
TSNは、複数の国際標準規格で構成されており、時刻同期方式や時分割方式が規定されています。これらがEthernetの技術に加わることで、従来のEthernet通信ではできなかった制御通信(リアルタイム性の確保)と情報通信(非リアルタイム通信)の混在が可能になります。

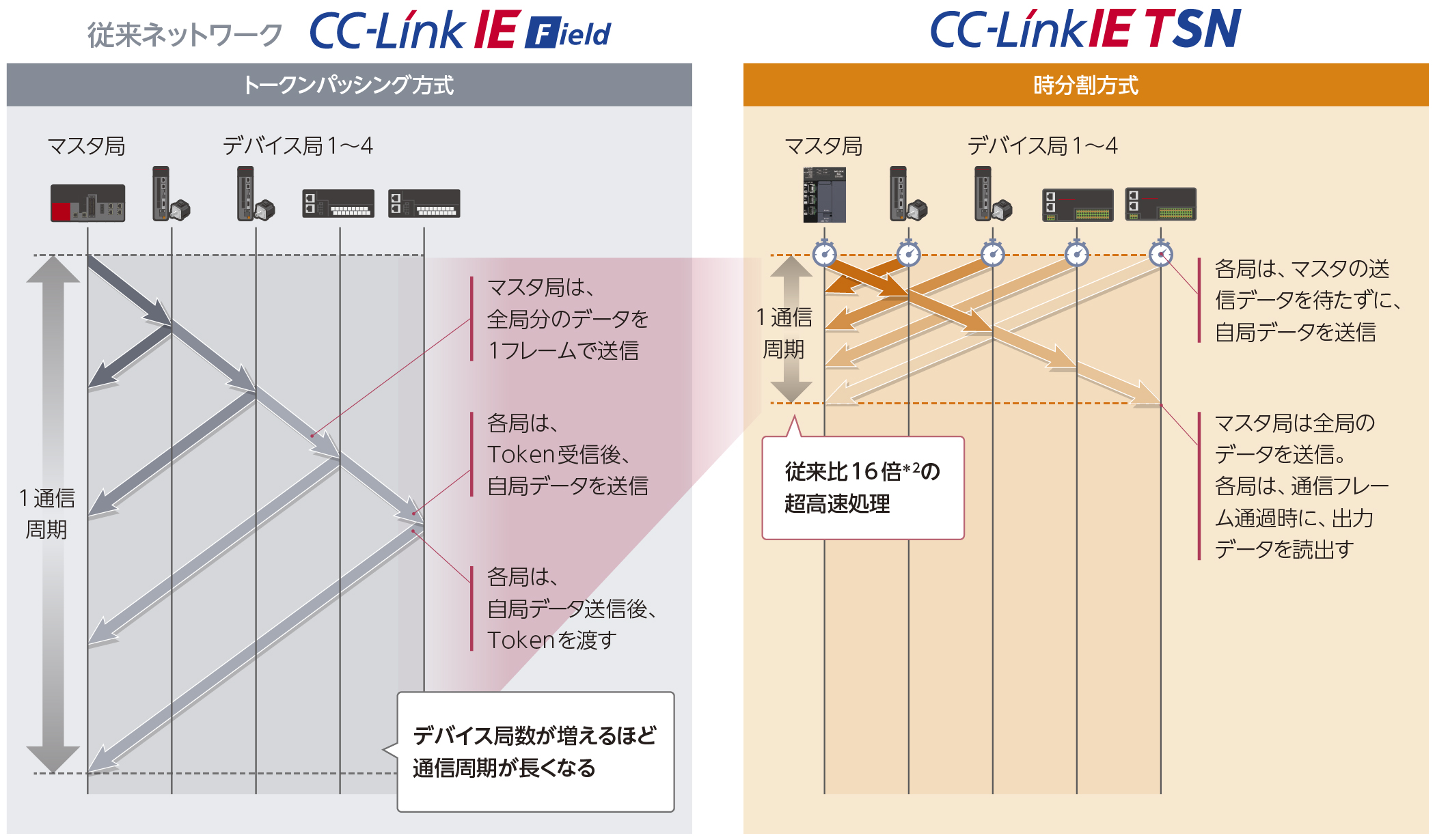
CC-Link IE TSN の時分割方式通信でデバイス局数に依存しにくい通信が可能
通信プロトコルに時分割方式を採用しているため、各接続局間の入力と出力の同時通信が可能です。
CC-Link IE TSNの効率的なプロトコルにMELSEC MXコントローラの高速リンクスキャンを組み合わせることにより、サイクルタイムの大幅短縮を実現できます。通信周期混在も可能なため、デバイス局数が多くても高速・軽量な通信を保証できます。
*1: Time-Sensitive Networking
*2: CC-Link協会におけるマネージャ(マネージャ局)は、マスタ(マスタ局)と表記することがあります。
*3: 同一条件の場合
システム全体の制御性能を最適化
MELSEC MXコントローラ1台で各軸やデバイス局ごとに、最大3種類の演算周期・通信周期を設定できます。*1
複数のCPUユニットを準備する必要がなく、装置のコストパフォーマンスを最大限に向上できます。
多軸装置でも、高速演算周期の制御性能を部分的に確保できるため、カッティング工程などの精度を向上できます。


*1: GX Works3から設定できます。通信周期設定はCC-Link IE TSN構成の設定画面から、演算周期設定は軸パラメータ設定から設定できます。
制御通信とTCP/IP 通信の無線化が可能NEW
CC-Link IE TSN Class Aによる制御通信(一般通信/安全通信*1)と、TCP/IP通信による情報通信の無線化が可能です。
無線通信の活用により、柔軟なシステム構築が可能です。

*1: 将来対応です。
*2: MELSEC MXコントローラをマネージャ局にした場合のローカル局接続は将来対応です。
*3: ローカル局のCC-Link IE TSN Class A通信は将来対応です。
スキャンタイムに依存しない、マークの入力と精密なカットを実現
ロールtoロールなどの高速かつバラつきのないI/O制御を必要とする場合でも、コントローラのスキャンタイムに依存しない入出力がネットワーク経由で実現できます。マークの検出とカッティングの入出力タイミングの誤差(ジッタ)が小さいため、ウェブ材の検出とカット長のバラつきを低減できます。高速でワークが流れる製造ラインの歩留まりを向上できます。


*1: 実際の入出力タイミングは使用する機器により異なります。
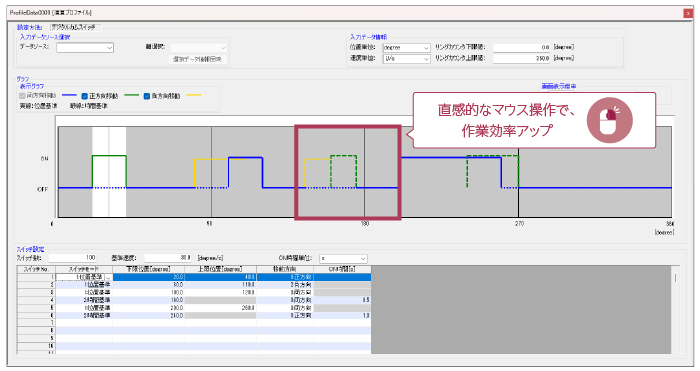
イラストで直感的な操作が可能
デジタルカムスイッチの設定は、GX Works3を用いて行います。
画面のグラフをマウス操作することで、位置とI/O出力のタイミングを簡単に設定できます。
また、モータ速度が変動しても「位置に応じたタイミング出力の計算」や「割込み命令」の調整が不要なため、工数を削減できます。
64bit 対応で高精度な制御が可能
64bitで制御しているため、演算時の丸め誤差を最小限に抑え、高精度な制御ができます。
位置決め範囲と分解能について
32bitの従来品と比較して、高分解能を維持しつつ、位置決め範囲を広く設定できます。

絶対位置管理システムと現在位置復元
MELSEC MXコントローラは絶対位置管理を64bitで行っているため、電源断からの現在位置復元の際のリスクを大幅に低減できます。

世界のモーションプログラミングをひとつの製品で
複数のモーションプログラミングスタイルに対応しているため、MELSEC MXコントローラの性能や機能を使い慣れた方法で最大限に活用できます。
「PLCopen® Motion Control FB」プログラミング
国際的な標準規格であるPLCopen® Motion Control FBのライブラリを使用したプログラミングができます。
世界中のエンジニアが共通の仕様で開発できるため、グローバル拠点での開発・保守がスムーズにできます。
ファンクションブロックやST言語、ラベルを用いた可読性の高いプログラミングが可能です。

「デバイスモーション制御方式」プログラミング将来対応
バッファメモリアクセスデバイスへのデータ書込みのみで実行可能な「デバイスモーション制御」プログラミングに対応しています。
ラダーおよびデバイス操作に精通したエンジニア向けに、従来と同様のプログラミング環境を提供します。
新機能の命令もバッファメモリから呼び出すことが可能です。

*1: デバイスモーション制御はPLCopen® Motion Control FBやFBライブラリとの混在も可能です。デバイスモーション制御で制御可能な軸は128軸までです。アドバンスト同期や一部命令のバッファメモリアドレスは将来対応です。
プログラム資産の活用NEW
MELSEC iQ-Rシリーズで使用していたパラメータなどのプログラム資産を、MELSEC MXコントローラへ流用できます。*1

*1: プログラムのバッファメモリアドレスなど、一部将来対応の機能があります(移行ガイドも公開予定です)。
*2: 対象機種はRD77MS、RD77GF、RD78G(S)です。RD78Gの流用機能は将来対応です。
*3: QD77MSはRD78Gを経由した段階的な置き換えが必要です。RD78Gへの置き換えは「」をご参照ください。
複雑な多軸の調整も、視覚的にわかりやすい
アドバンスト同期制御*1
機械機構(ギア、シャフト、変速機、カムなど)をソフトウェアに置き換えて、同期制御を簡単に実現できます。巻回機や塗布装置など多軸同期が必要な装置でも、位置ずれのないカム制御や運転パターンを簡単に調整できます。カット位置の微調整や搬送スピードに合わせた同期位置の調整ができ、高品質で高い生産性を実現します。

同期制御パラメータ
カムデータの作成やパラメータ設定が視覚的にわかりやすく、複雑な多軸同期プログラムをイメージして作成できるため、ローコードで作業の効率が向上します。


*1: モーション制御FBを使用
*2: PLCopen®に準拠したMC Camln命令からの呼出しにも対応
視覚的に分かりやすい位置決め設定NEW
位置決めデータ運転
GX Works3から位置決めのデータ(ポイントテーブル)を設定できます。
直線補間、2軸円弧補間、単軸位置決めなど豊富な制御でさまざまな用途に対応できます。
Mコード、スキップ機能などの充実した補助機能でお客様のニーズに対応します。

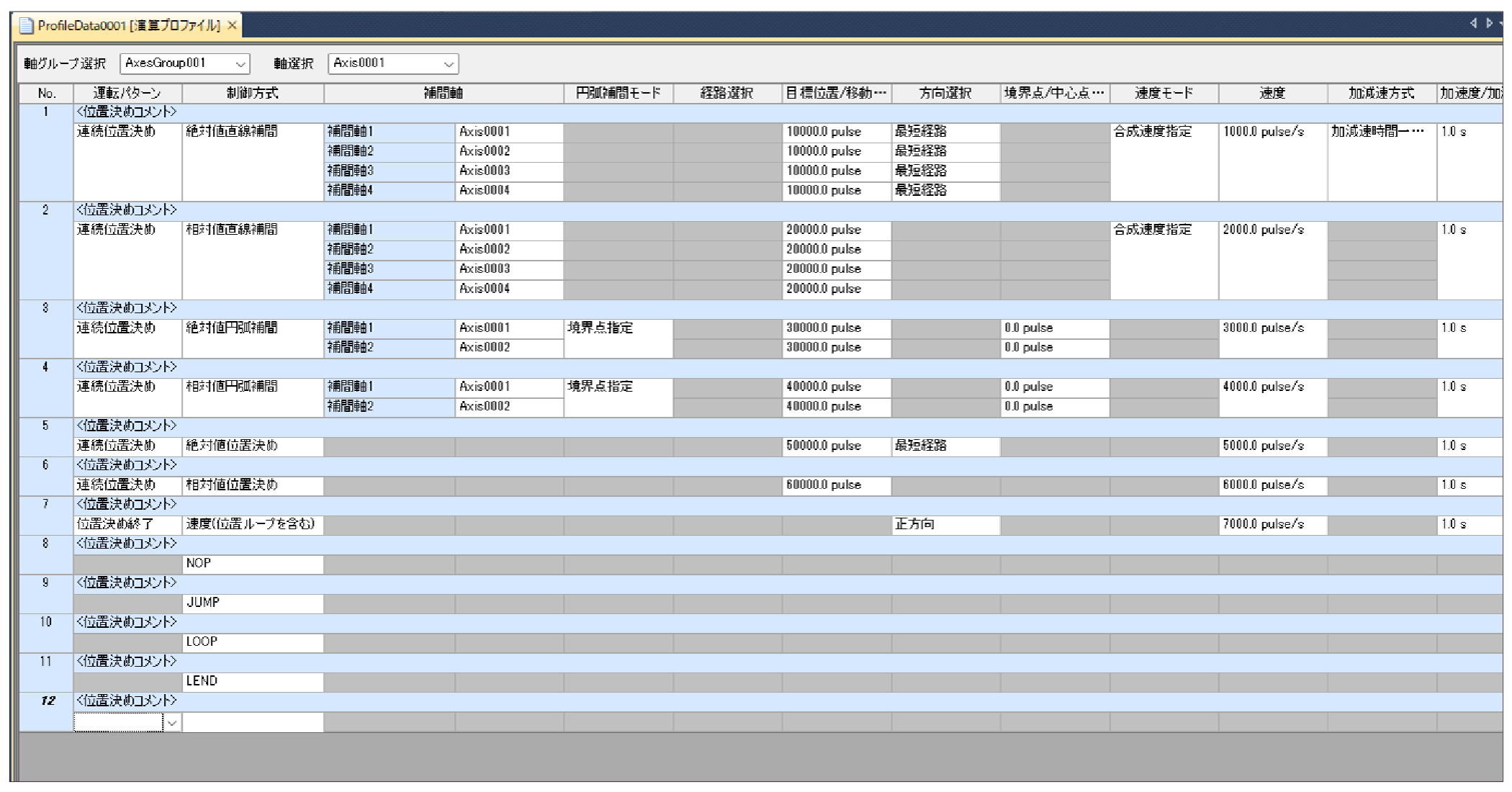
- ■FBやバッファメモリ*1からの実行が可能
- ■位置決めデータを専用画面でまとめて設定可能
- ■運転パターンを複数作成することで複雑な位置決め制御を実施可能
*1: 将来対応です。
コントローラによるさまざまな制御ループを構築可能
モーションサイクリック制御
- ●通常の位置決め運転に加えて演算周期ごとに目標トルク、位置、速度を送信可能なモーションサイクリック制御に対応
- ●タスク種別にシーケンサタスクからネットワーク送信までを保証する“ネットワーク通信周期同期”を設定可能
- ●浮動小数点演算能力が約15倍*1向上

これらにより、プログラム実行~モーション演算~ネットワーク送受信の全てが同一の通信周期で実行されるため、ユーザプログラムで制御指令をリアルタイムに生成し、センサの値を駆動機器に即時伝達させるような高度な制御ループを実現できます。


*1: MELSEC iQ-Rシリーズとの比較
*2: MX-Fモデルの場合、演算周期は最速250μsです。
高速・高応答で、安定した圧力制御を実現
圧力センサ (ロードセル*1) のアナログ信号をMR-J5-G-LLに取り込み、圧力制御を行います。負荷が変動しても脈動の少ない圧力保持が可能です。圧力モデル適応制御を使用しており、押し込みを抑えつつ、高応答な圧力制御が可能です。
圧力制御の動作例

リアルタイム性の高いアプリケーションに対応
サイクリック圧力制御モード(cspr)に対応したMR-J5-G-LLと組み合わせることで、ファンクションブロックの圧力指令に応じた圧力のフィードバック制御をサーボアンプが行います。圧力制御ループはコントローラを介さないため、高速・高応答です。


*1: 力を測定するセンサで、力を電気信号に変換して圧力の測定が可能です。
パートナーメーカーとの連携で、豊富な機器に対応
MELSERVO-J5で他社モータも駆動可能
MELSERVO-J5を使用することでサーボアンプを共通化でき、予備品点数を削減できます。
豊富なパートナーメーカーとの連携により、さまざまな種別のモータから用途に適したものを選定できます。*1

他社ドライブユニットと連携可能
MELSERVOだけでなく、CC-Link IE TSN対応の他社ドライブユニットとも連携できます。

設定イメージ

*1: 個別のモータ駆動については最寄りの支社にお問い合わせください。